Programación probabilística de sistemas inteligentes usando inferencia activa
Importancia – La programación de sistemas inteligentes requiere que los mismos puedan aprender y adaptar de forma autónoma una política de actuación satisfactoria en distintos entornos de funcionamiento con mínima experimentación. Tal capacidad es imprescindible para automatizar tareas tan diversas como la conducción autónoma de automóviles o drones, robots móviles para asistencia a adultos mayores y sistemas mecatrónicos para supervisión de pacientes y rehabilitación kinesiológica. Por la naturaleza incierta de las tareas que se pretende automatizar, la seguridad es un factor crítico que debe incorporarse en el diseño y construcción de un sistema inteligente. La programación probabilística proporciona el marco adecuado de desarrollo de sistemas inteligentes naturalmente equipados con herramientas de inferencia y optimización Bayesiana. Lenguajes de última generación como Julia combinados con los nuevos enfoques de validación y verificación formal del comportamiento proveen las herramientas necesarias para abordar su diseño y programación. El plan de tesis aborda este desafío desde la perspectiva de la inferencia activa que concibe al sistema como un agente situado que a todo momento predice el estado de su entorno y actúa para minimizar la sorpresa asociada con sus errores de predicción ajustando los modelos del mundo exterior que le rodea.
Problemática – El empleo de la inferencia activa como herramienta de diseño demanda formalizar las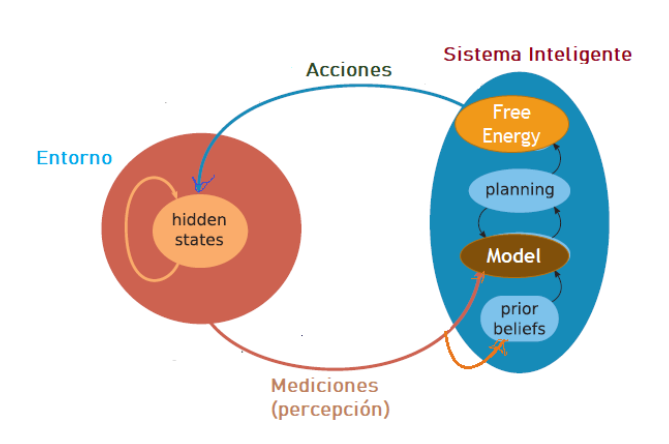 creencias y modelos incorporados en el sistema inteligente de forma tal de que su performance computacional permita la toma de decisiones en tiempo real. Además, el sistema debe abordar el problema de disponer de una capacidad perceptiva limitada que implica la existencia de estados ocultos que puede inferir, pero no puede percibir. Por ejemplo, un conductor artificial de un automóvil puede “ver” con su cámara HD a un grupo de peatones esperando para cruzar, pero desconoce sus intenciones. Estas últimas las debe inferir a partir de sus modelos del comportamiento de los peatones. Para garantizar la performance y seguridad en el comportamiento del sistema inteligente, el plan de tesis contempla el empleo de técnicas de síntesis Bayesiana de programas probabilísticos usando trazas de comportamiento en distintos experimentos reales y simulados. Para minimizar la experimentación, se utilizarán representaciones probabilísticas de los modelos del entorno combinados con técnicas de propagación de creencias a partir de muestreos de las distribuciones a posteriori (Thompson Sampling).
creencias y modelos incorporados en el sistema inteligente de forma tal de que su performance computacional permita la toma de decisiones en tiempo real. Además, el sistema debe abordar el problema de disponer de una capacidad perceptiva limitada que implica la existencia de estados ocultos que puede inferir, pero no puede percibir. Por ejemplo, un conductor artificial de un automóvil puede “ver” con su cámara HD a un grupo de peatones esperando para cruzar, pero desconoce sus intenciones. Estas últimas las debe inferir a partir de sus modelos del comportamiento de los peatones. Para garantizar la performance y seguridad en el comportamiento del sistema inteligente, el plan de tesis contempla el empleo de técnicas de síntesis Bayesiana de programas probabilísticos usando trazas de comportamiento en distintos experimentos reales y simulados. Para minimizar la experimentación, se utilizarán representaciones probabilísticas de los modelos del entorno combinados con técnicas de propagación de creencias a partir de muestreos de las distribuciones a posteriori (Thompson Sampling).
Objetivos del plan – Desarrollo y prueba de métodos y algoritmos computacionales para aplicar inferencia activa en la programación probabilística de sistemas inteligentes usando Lenguaje Julia. Para formalizar el diseño de los algoritmos desarrollados se utilizarán grafos de Forney usando el ForneyLab en Julia que permitirán describir formalmente el intercambio de mensajes entre los distintos bloques constructivos del sistema inteligente. Para actualizar los modelos probabilísticos del entorno se integrarán la optimización Bayesiana con la propagación de creencias (beliefs) para generar datos con máximo contenido informativo en experimentos diseñados al efecto. Se usarán diferentes casos de estudio usando modelos simulados de robótica industrial. Como caso de estudio real, se utilizará una plataforma robótica de experimentación intensiva para el desarrollo de productos innovadores. El grupo de trabajo mantiene un convenio de colaboración con el KIWI-Biolab de la Universidad Técnica de Berlín (TU Berlin) que permitirá el testeo de prototipos del sistema inteligente en un contexto demandante caracterizado por diversas tareas de modelado y optimización.
Contacto: Dr. Ernesto C. Martínez (ra.vo1743418778g.tec1743418778inoc-1743418778efatn1743418778as@ra1743418778gnIsa1743418778ceb1743418778)